- Published on
[A3C] Asynchronous Methods for Deep Reinforcement Learning
- Volodymyr Mnih, Adrià Puigdomènech Badia, Mehdi Mirza 등
- 2016
- 논문 링크
Summary
- 복수의 Agent를 두고 Policy를 비동기적으로 업데이트하면 기존의 Replay Memory를 사용하는 방법들보다 더 빠르고 효율적인 학습이 가능하다.
- 동일한 환경에 대해 Parallel하게 Transaction을 수집하므로 Online Learning의 두 가지 문제, 즉 학습 데이터가 Non-Stationary하고 Correlated 되어 있다는 문제를 완화한다.
- 제시하는 Asynchronous RL Framework의 특징으로는 Accumulating Gradient, Global Shared Parameter, Forward View 등이 있으며, 대표적인 알고리즘으로는 **Asynchronous Advantaget Actor-Critic(A3C)**이 있다.
Online Learning is Hard
Online Learning, 즉 Agent가 Environment와 직접적으로 상호작용하며 Policy를 업데이트하는 것은 본질적으로 불안정하며 학습이 잘 되지 않는다. 이는 Online Learning 과정에서 Environment로 부터 받아 학습의 대상이 되는 Sequence Data가 다음과 같은 두 가지 특징을 가지기 때문이다.
- Non-Stationary
- Correlated
여기서 Non-Stationary란 Time Series Data에서 평균, 분산 등 파라미터가 시간이 지남에 따라 계속 바뀌는 특성을 말하고, Correlated는 Sequence의 각 Data Point 간에 상관 관계가 존재한다는 것을 말한다. 이러한 문제를 해결하기 위해서는 일종의 안정화가 필요한데, 대표적인 것이 Replay Memory를 사용하는 것이다.
Replay Memory
Replay Memory를 사용하면 많은 수의 Transaction을 모아두고 랜덤 샘플링하여 업데이트에 사용하기 때문에 Non-Stationary한 특성이 줄어들고, Correlation 또한 제거할 수 있다. 실제로 DQN을 비롯해 많은 강화학습 알고리즘이 Replay Memory를 사용하여 큰 성공을 거두었다. 하지만 Replay Memory를 사용하는 방법도 단점을 가지고 있는데, 첫 번째는 메모리를 많이 사용하고 업데이트에 요구되는 연산량이 많다는 것이고, 두 번째는 Q-learning과 같은 Off-Policy Learning만 가능하다는 것이다.
Parallel Update
논문에서는 Parallel Update를 통해 Online Learning이 가지는 두 가지 문제, Non-Stationary와 Correlated 문제를 완화하면서도 Replay Memory의 단점을 보완할 수 있다고 언급한다. 여기서 말하는 Parallel Update란 말 그대로 복수의 Agent와 각각에 대응하는 Environment를 만들고 비동기적으로 각 Agent가 Transaction을 수집하도록 하여 이를 학습에 사용하는 방식이라고 말할 수 있다.
구체적으로 Parallel Update에서 Agent들은 파라미터를 서로 공유하기 때문에 각 Agent가 실시간으로 파라미터를 업데이트 한다면 여러 환경에서 수집되는 복수의 Transaction이 임의의 순서대로 학습에 사용되는 것과 마찬가지 효과를 얻게 된다. 따라서 상대적으로 학습 데이터들이 Stationary하면서도 데이터 포인트 간 Correlation을 줄이는 것이 가능해진다. 또한 Replay Memory가 전혀 필요하지 않기 때문에 Off-Policy는 물론 On-Policy도 가능하여 알고리즘을 선택하는 데 있어서도 상대적으로 자유롭다. 마지막으로 학습이 효율적이기 때문에 GPU를 사용하지 않고, Multi-Core CPU만으로도 기존의 방법론보다 더욱 빠르게 학습이 가능하다고 한다.
Asynchronous RL Framework
기본적인 Parallel Update 알고리즘으로 논문에서는 다음 네 가지를 제시한다. 알고리즘을 구현하는 데 있어 신뢰 가능하면서도 자원을 적게 사용하는 것에 초점을 맞추었다고 한다.
- One-Step Q-learning
- One-Step SARSA
- n-Step Q-learning
- Advantage Actor-Critic(A3C)
Asynchronous RL Framework의 가장 큰 특징은 Asynchronous Actor-Learners이다. 비동기적인 Actor가 여러 개 존재하여 각자 학습을 진행한다는 것으로, Actor는 동일한 환경의 서로 다른 부분을 병렬적으로 탐색하게 된다. 구체적으로 다음 세 가지 특징들을 가지고 있다(Forward View는 n-step Q-learning과 A3C만 해당).
- Accumulating Gradient
- Global Shared Parameter
- Forward View
비동기적으로 Global Parameter를 업데이트하므로 Asynchronous RL Framework에서는 Optimizer 또한 어떻게 할지 문제 된다. 쉽게 말해 Agent마다 Optimizer를 둘 것인지, 공유할 것인지 결정해야 하는데 실험 결과 Optimizer를 공유하는 RMSprop가 가장 robust한 policy를 만들어냈다고 한다.
One-Step Q-learning
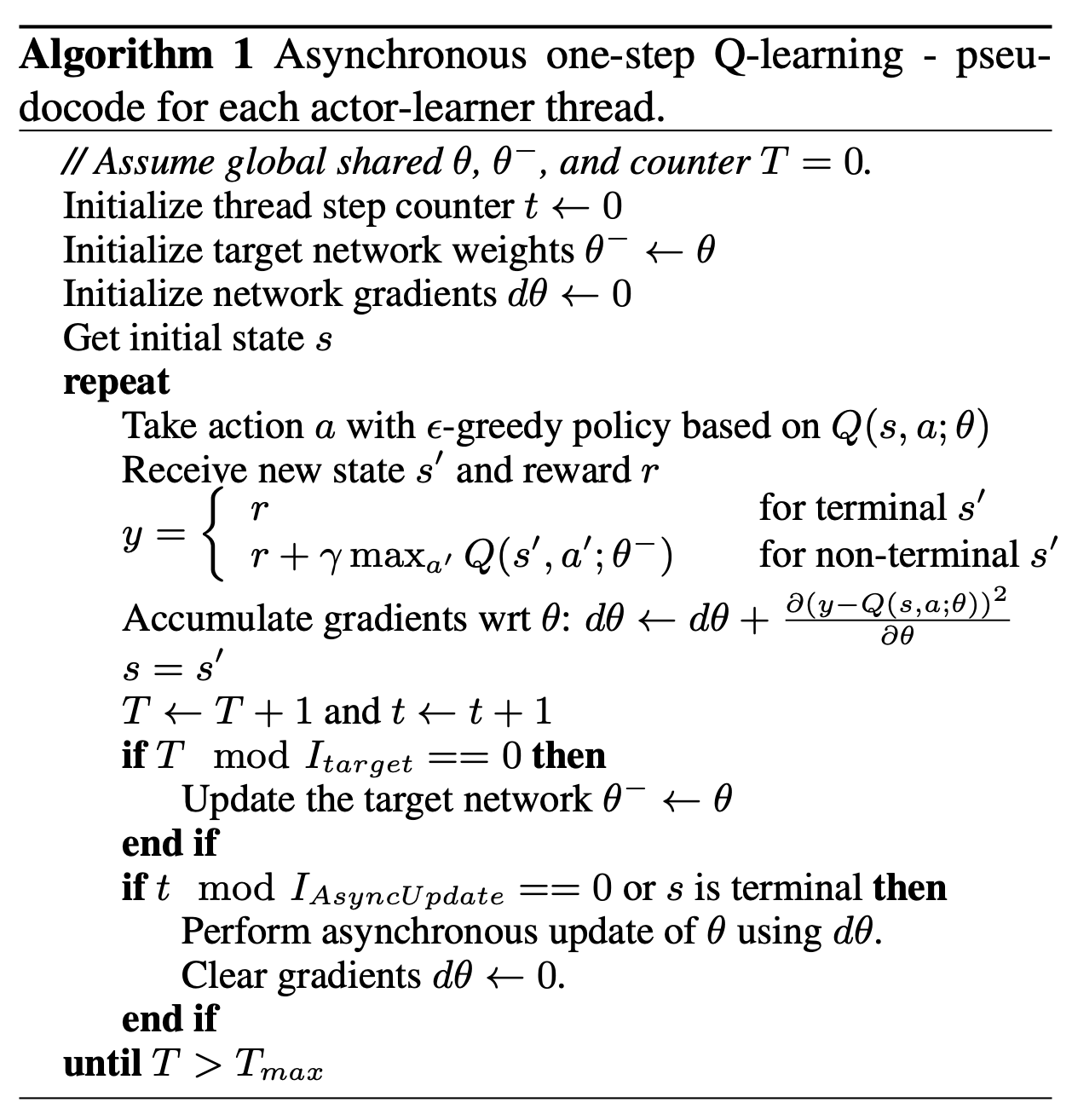
각각의 경우 어떻게 학습이 이뤄지는 지에 대해서는 알고리즘을 보면서 확인하면 보다 쉽게 이해할 수 있다. 참고로 모든 알고리즘은 단일 Thread에서 동작하는 프로세스를 기준으로 한다.
왼쪽의 알고리즘을 보게 되면 첫 번째 줄에서 Current Value Net 와 Target Value Net 를 Thread 간에 공유한다는 것을 알 수 있다. 초기화 이후에 가장 먼저 수행하는 것은 탐색이며, 방법은 DQN과 크게 다르지 않다. 참고로 각각의 Actor가 서로 다른 탐색 알고리즘을 가지도록 하여 탐색의 다양성을 높이면 보다 Robust한 Policy를 만들 수 있다고 한다.
그런데 Gradient를 계산하고 Current Value Net을 업데이트하는 과정에 DQN과 차이가 있다. 알고리즘을 보면 DQN처럼 매 Step 업데이트를 하는 것이 아니라 Step마다 구해지는 Gradient를 누적해가며 조건이 충족될 때에만 업데이트를 수행한다. 이와 같이 업데이트하는 것은 Mini-Batch Update와 유사한데, 이를 통해 Agent가 다른 Agent가 수행한 업데이트를 Overwrite 할 가능성을 낮추고 연산의 효율성을 높일 수 있다고 한다.
구체적으로 업데이트는 Current Value Net을 업데이트하는 것과, Target Value Net을 업데이트 하는 것, 두 가지가 있는데 Current Value Net은 Thread의 Step Counter 를 기준으로 주기마다 업데이트 하고, Target Value Net은 Global Step Counter 를 기준으로 주기마다 업데이트 한다.
One-Step SARSA
One-Step SARSA는 One-Step Q-learning과 거의 유사하며, 에서 가 실제 Maximizing Action이 아니라 Policy에 의해 선택되었던 Action이라는 점에서만 차이가 있다.
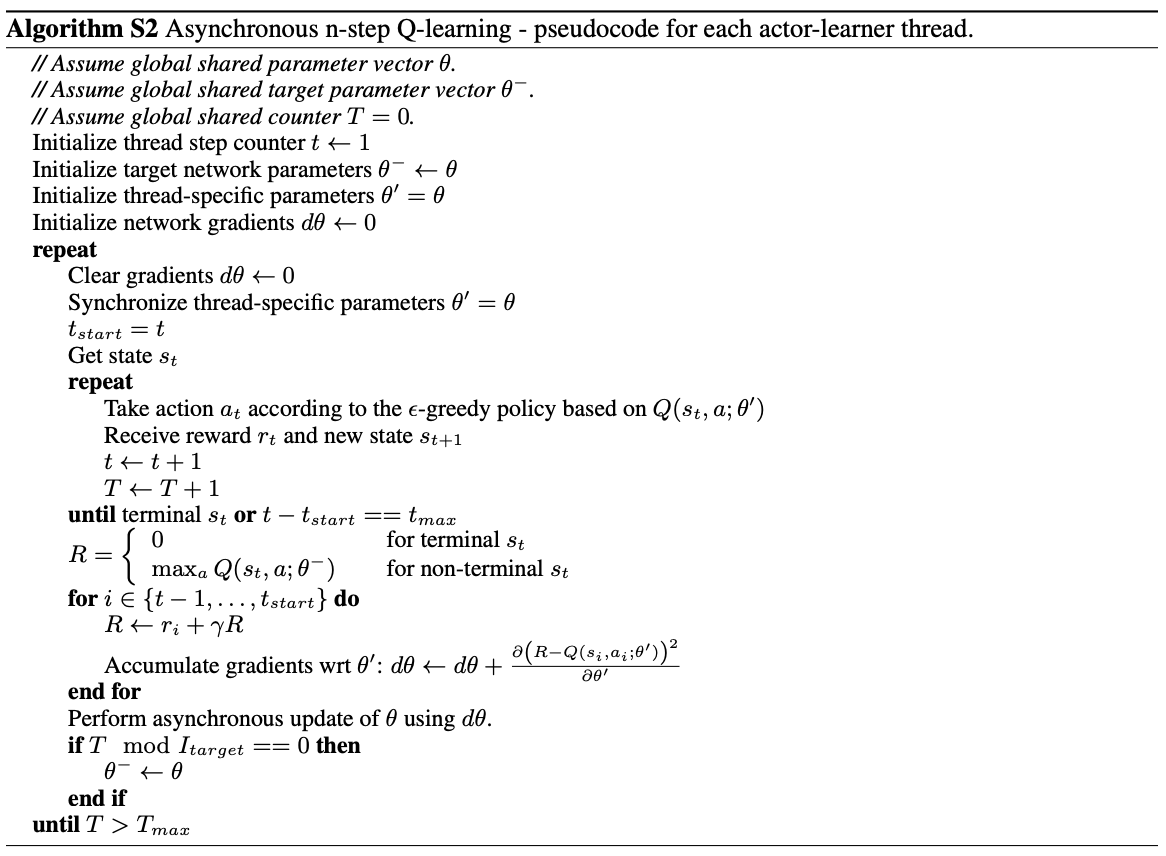
n-Step Q-learning
n-Step Q-learning과 One-Step Q-learning의 가장 큰 차이점은 Forward View이다. Forward View란 위의 알고리즘에서 내부 루프를 말하는 것으로, step만큼 탐색 알고리즘에 따라 탐색을 진행하고 그에 따라 얻은 개의 Reward들을 학습에 사용하는 방법이라고 할 수 있다.
그리고 n-Step Q-learning에는 Thread 마다 고유의 파라미터 를 가진다는 점에서도 차이가 있다. 한 번 루프를 돌 때마다 가장 먼저 를 Current Value Net 과 동기화해주는데, 이는 Forward View를 수헹하는 과정에서 Current Value Net이 다른 Agent에 의해 변화하는 것을 방지하기 위함으로 보인다. 따라서 에 대한 Gradient 또한 를 기준으로 구하고 있다.
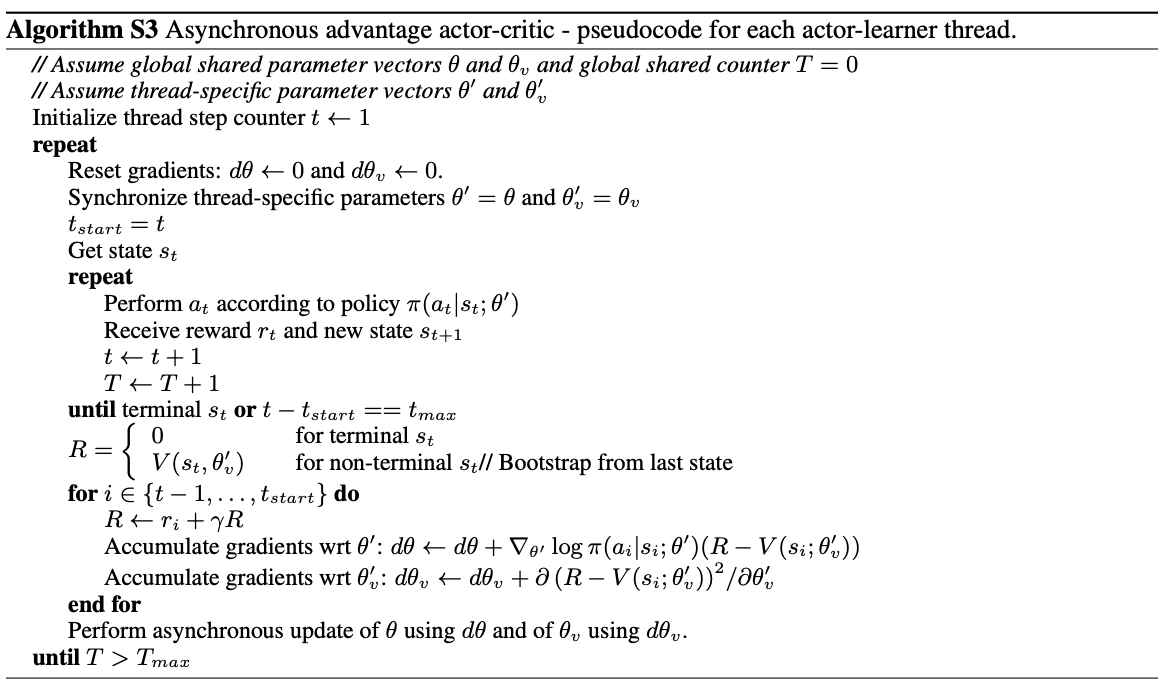
Advantage Actor-Critic(A3C)
Advantage Actor-Critic은 논문에서 제시하는 방법 중 가장 성능이 좋으며, Asynchronous Advantage Actor-Critic, 줄여서 A3C라고 흔히 부르는 알고리즘이기도 하다. n-step Q-learning과 마찬가지로 Forward View를 적용하고 있고 Thread 마다 고유 파라미터도 가지고 있다. Actor와 Critic의 Gradient를 구하는 방법은 본래의 그것과 크게 다르지 않다.
논문에서는 Exploration 방법론으로 아래 식과 같이 Objective Function에 의 Entropy를 더하는 방법을 제시하고 있다.
위의 식과 같이 Entropy Regularization Term을 더해주는 방식으로 구현이 가능하다.