- Published on
Learning Combinatorial Optimization Algorithms over Graphs
- Hanjun Dai, Elias B. Khalil, Yuyu Zhang, Bistra Dilkina, Le Song
- 2017
- 논문 링크
Summary
- Graph 구조를 가지고 있는 NP-Hard 문제를 해결하는 방법으로 (1) 제안하는 Graph Embedding Network 구조인 Structue2Vec로 개별 Node의 Feature Embedding을 추출하고, (2) 그에 따라 매 Step의 Action으로 하나의 Node를 선택하는 과정을 반복적으로 수행하는 강화학습 방법론을 제시한다.
- 알고리즘의 일반적인 성능 검증을 위해 세 가지 대표적인 NP-hard graph 문제인 Minimum Vertex Cover, Maximum Cut, Traveling Salesman Problem에 대한 실험을 진행했으며, 서로 다른 성격의 세 가지 실험 모두에서 일정 성능을 확보할 수 있었다.
- 전체 Graph를 고려한 Node Embedding을 추출하기 위해 반복적으로 Node Embedding을 업데이트한다. 그리고 Dealyed Reward로 인한 문제점을 줄이기 위해 Q-iteration Approach를 사용하여 Q function을 업데이트한다.
NP-hard graph optimization problem
논문에서 제시하고 있는 NP-hard Graph 문제는 Minimum Vertext Cover(MVC), Maximum Cut(MAXCUT), Traveling Salesman Problem(TSP) 세 가지이다. 문제의 정의에 사용되는 Notation은 다음과 같다.
- Gpaph:
- Set of Nodes:
- Set of Edges:
- Edge Weight fucntion:
- Subset of Nodes:
Minimum Vertext Cover(MVC)
MVC는 Graph에서 최소한의 Node를 선택하여 Graph의 모든 Edge를 커버하는 방법을 찾는 것이다. 여기서 커버한다는 것은 모든 Edge가 선택된 Node들과 연결되어 있음을 의미한다.
\eqalign{ &\text{Given Graph } G, \text{ Minimize } \lvert S \rvert \\ &\text{When } S \text{ covers all of the Edges } E }Maximum Cut(MAXCUT)
MAXCUT은 어떤 Edges 집합의 Weight가 극대화되도록 하는 방법을 찾는 문제이다. 이 경우에도 선택 대상은 Edge가 아니라 Node가 되며, 선택한 Node의 집합인 와 그렇지 못한 Node 집합인 를 서로 연결하는 Edge를 선택한 것으로 본다.
\eqalign{ &\text{Given Graph } G, \text{ find } S \text{ which is maximize } \Sigma_{(u, v) \in C} w(u, v)\\ &\text{Where the cut-set } C \subset E \text{ is the set of edges with one end in } S \text{ the other end in }V \setminus S }Traveling Salesman Problem(TSP)
세 문제 중 가장 유명한 TSP는 Edge를 최대 한 번만 사용하며 모든 Node를 순회할 때(처음과 끝이 동일) 사용한 Edge의 weight의 총합을 최소로 만드는 문제이다.
How to Solve: Greedy Algorithm
MVC와 MAXCUT은 전체 Node 집합 중 최적의 부분 집합 를 선택하는 문제이고, TSP는 모든 Node 를 줄세우는 최적의 방법을 찾는 문제라는 점에서 서로 다른 점을 가지고 있다. 따라서 세 가지 문제, 나아가 Graph 구조의 NP-hard 문제에 대한 일반적인 해결책을 제시하기 위해서는 문제들이 공통적으로 가지는 요소를 찾고, 그에 맞춰 추상화해야 한다.
논문에서는 세 가지 문제 모두 Node를 선택해야 한다는 점에 초점을 맞추고 있으며, 논문에서 제안하는 알고리즘은 이미 선택된 Subset 와 전체 Graph에 대한 정보를 가지고 한 번에 하나씩 Subset 에 새로운 node를 추가하는 방식을 택하고 있다. 이러한 방법론은 Heuristic Algorithm 중 하나인 Greedy Algorithm에서 영향을 받았다고 한다.
- A generic greedy algorithm selects a node to add next such that maximizes an evaluation function, , which depends on the combinatorial structure of the current partial solution.
- The step is repeated untila termination criterion is satisfied.
전체적으로는 이러한 방법론을 적용한다 하더라도, 어떤 Node를 선택하는 것이 최적인지는 문제의 특성에 따라 달라진다. 따라서 개별 문제의 특성에 따라 추가적으로 다음과 같이 정의하고 있다.
Minimum Vertext Cover
- Objective Function:
- Terminal Criterion: is all edges cover?
MVC의 목표는 최소한의 Node를 선택하는 것이므로, 목적 함수는 Node 개수가 늘어감에 따라 줄어들게 된다. Node는 모든 Edge가 커버될 때까지 계속해서 선택하게 된다.
Maximum Cut
- Objective Function:
- Terminal Criterion: No need.
MAXCUT의 목표는 Edge 집합의 Weight 의 총합을 극대화하는 것이며, 이 때 Edge 집합은 아래와 같이 정의된다.
Traveling Salesman Problem
- Objective Function:
- Terminal Criterion:
TSP는 하나씩 Node를 선택해가며 최종적으로 모든 Node를 선택해야 한다. 따라서 종료 조건은 가 된다. 그리고 TSP는 마지막에 선택된 Node는 항상 시작 Node로 돌아와야 한다. 따라서 이를 고려해 목적 함수가 설계되어 있다.
Graph Embedding: Structure2Vec
좋은 Graph Embedding이란 Graph의 전체적인 특성과 함께 개별 Node 혹은 Edge의 특성을 잘 표현해야 한다고 할 수 있다. 다음 Node를 Action으로 결정해야 하는 강화학습의 관점에서 본다면 Graph Embedding은 State의 질을 결정하게 되고, 이러한 점에서 문제의 특성을 정확하게 반영하는 Graph Embedding을 뽑아내야 좋은 Policy를 얻는 것 또한 가능하다.
Structure2Vec
Graph Embedding을 뽑는다고 하면 Node Embedding과 Edge Embedding 두 가지를 생각해 볼 수 있다. 논문에서 풀고자 하는 문제들은 모두 Node를 선택하는 것인 만큼 여기서는 Node Embedding에 집중하고 있는데, 논문에서 제시하는 네트워크 구조인 Structure2Vec을 사용하면 아래 수식에 따라 각 Node의 Embedding 를 업데이트하는 방식으로 전체 Node Embedding을 구하게 된다.
위의 식은 아래와 같이 Model Parameter와 Non-linear function으로 표현할 수 있다.
이때 라고 하면, 각 Model Parameter는 , , , 의 크기를 가지고 있다.
Recursive Update
Structure2Vec의 두 번째 항에서는 현재 Node 와 인접한 모든 Node의 Feature Embedding 을 더하고 있다. 세 번째 항에서는 연결되어 있는 모든 Edge의 Weight 를 더하고 있다. 이렇게 구한 두 번째와 세 번째 항은 모두 새로운 을 구하는 데에 사용된다. 즉, 한 번 Structure2Vec 구조를 통과하여 업데이트된 Node Feature는 그 인접 Node와 Edge에 대한 정보를 모두 가지고 있다고 할 수 있다.
만약 위의 업데이트 과정을 두 번 반복한다면 주변의 Node와 Edge에 대한 정보 뿐만 아니라 2번 건너뛰어 도달할 수 있는 Node와 Edge에 대한 정보(2 Hop)까지 얻을 수 있을 것으로 기대할 수 있다. 즉 이와 같이 Recursive하게 번 업데이트하면 T-Hop 떨어진 Node와 Edge에 대한 정보도 담게 되며, 논문에서도 이러한 방법을 사용해 Node Feature Embedding을 뽑고 있다.
Policy: greedy policy with Q function
앞서 언급한대로 Policy는 step마다 하나의 Node를 Action으로 결정해야 한다. 이를 위해 추출한 Node Embedding 을 사용하여 **현재 상태(partial solution) 에서 개별 Node를 선택하는 것의 가치(q-value)**를 계산하는 function을 정의하고, Q function의 출력 값을 기준으로 Node를 greedy하게 선택하는 방법을 사용한다.
Training: Q-learning
이러한 Q function은 강화학습의 방법론(Q-learning)에 따라 업데이트하게 된다. Action과 State에 대해서는 위에서 여러 번 언급하였고, Action 에 따라 Next State 가 deterministic 하게 결정되기 때문에 Transition도 문제의 특성상 중요한 고려대상이 아니다. Reward Function은 다음과 같이 각 문제의 목적 함수 를 통해 구할 수 있다고 한다.
여기서 는 이번 step에서 선택된 새로운 Node 가 포함된 partial solution을 기준으로 결정한 cost를, 는 그렇지 않은 partial solution을 기준으로 구한 cost를 의미한다. 이와 같이 정의하고 있으므로 매 step의 Reward 총합 은 마지막의 cost 와 동일하다.
Reward Function까지 정의하였으므로 아래와 같은 기본적인 Q-learning의 업데이트 식에 따라 Q Function을 업데이트할 수 있다.
\eqalign{ &(y - \hat Q (h(S_t), v_t; \Theta))^2\\ & \text{where } y = \gamma \max_{v'} \hat Q (h(S_{t+1}), v'; \Theta) + r(S_t, v_t) }한 가지 아쉬운 점이 있다면 위와 같이 1 step 이후만을 기준으로 업데이트하게 되면 delayed reward 문제에 취약하다는 것이다. 쉽게 말해 장기적으로 이익이 되는 선택을 하지 않고, 근시안적으로만 Node를 선택하게 되어 Optimal Solution에 가까워지기 어려울 수 있다는 것이다. 이러한 문제를 줄이기 위해 다른 강화학습 알고리즘에서 쓰이는 n-step Q-learning 기법을 여기서도 제시하고 있다. n-step Q-learning는 업데이트 식은
로 1-step Q-learning과 동일하며, 의 계산 방식이 아래와 같이 시점까지 고려한다는 점에서 차이가 있다.
이를 구현하기 위해 Replay Buffer에 저장되는 Transition 또한 아래와 같이 일반적인 1-step Q-learning과 차이가 있게 된다.
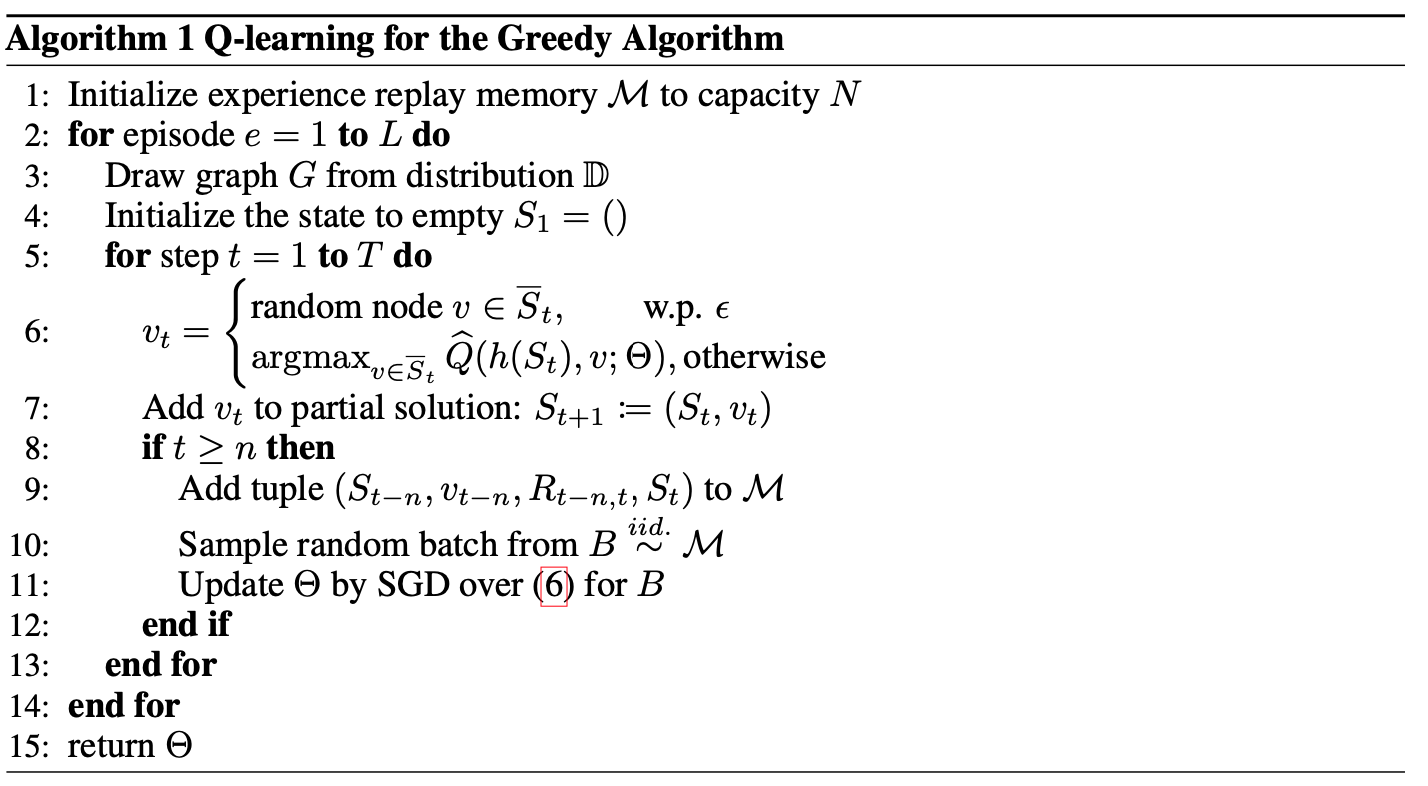
\eqalign{ &(S_t, a_t, R_{t,t+n}, S_{t+n}) \\ &\text{where } R_{t,t+n} = \Sigma_{i=0}^{n-1} r(S_{t+i}, a_{t+i}) }Algorithm
최종적인 알고리즘은 아래와 같다.