Temporal Difference
- Sutton의 2011년 책 Reinforcement Learning: An Introduction 2nd edition을 참고해 작성했습니다.
Introduction
Dynamic Programming(DP), Monte Carlo(MC) Method와 함께 Temporal-Difference(TD) Learning는 강화학습의 대표적인 업데이트 방식이다. 그 중에서도 TD는 DP, MC와 비교해 많은 장점을 가지고 있으며 현재 유행하는 많은 강화학습 알고리즘에서 사용하는 방법론이다. 이와 관련하여 Sutton은 책에서 다음과 같이 표현한다.
- “If one had to identify one idea as central and novel to reinforcement learning, it would undoubtedly be temporal-difference (TD) learning”
큰 틀에서 보면 세 가지 방법론은 모두 Policy Evaluation과 Policy Improvement를 반복하는 Generalized Policy Iteration(GPI)에 따라 동작한다. 다만 그 과정에서 어떻게 Value Function을 추정할 것인가, Policy Evaluation을 수행하는 방식에서 차이가 있다.
TD learning
TD는 DP, MC와 분명 다른 방법으로 Value Function을 업데이트하면서도 두 방법 간의 Combination으로 두 가지 방법의 장점을 함께 취하고 있다. 결론부터 말하자면 TD는 DP와 같이 BootStrapping을 통해 업데이트 하기 때문에 Return을 알 필요가 없어 MC와 달리 에피소드가 끝나기를 기다리지 않아도 된다는 점에서 효율적이다. 그리고 MC와 같이 Sampling을 가정하기 때문에 DP와 달리 Model을 알지 못해도 된다는 점에서 자유롭다.
BootStrapping
TD에서는 다음과 같이 Value Function을 업데이트 한다.
\[V(s_t) \leftarrow V(s_t) + \alpha [R_{t+1} + \gamma V(s_{t+1}) - V(s_t)]\]TD의 업데이트 식은 아래의 MC의 업데이트 식과 비교해서 보면
\[V(s_t) \leftarrow V(s_t) + \alpha [G_t - V(s_t)]\]MC에서 전체 에피소드의 누적 Reward를 의미하는 \(G_t\)가 TD에서는 \(R_{t+1} + \gamma V(s_{t+1})\)로 대체되었다는 것을 알 수 있다. 한 마디로 \(s_t\)의 Value를 현재 받은 Reward와 다음 State \(s_{t+1}\) Value 만을 사용하여 추정하겠다는 것이다. 이와 같이 True Value Function에 가까워지기 위해 Current Estimate Value Function으로 업데이트하는 것을 BootStrapping이라고 한다.
Sampling
DP와 같이 BootStrapping을 사용하지만 본질적으로 TD의 업데이트 방식은 DP와 차이가 있다. DP의 업데이트 수식은 다음과 같이 얻어지는데
\[\eqalign{ v_\pi(s) &= E_\pi[G_t \lvert S_t = s]\\ &=E_\pi [ \Sigma_{k=0}^\infty \gamma^k R_{t+k+1} \lvert S_t = s ]\\ &=E_\pi [ R_{t+1} + \gamma \Sigma_{k=0}^\infty \gamma^k R_{t+k+2} \lvert S_t = s ]\\ &=E_\pi [ R_{t+1} + \gamma v_\pi (S_{t+1})\lvert S_t = s ]\\ }\]Model에 대한 정보, 즉 State Transition과 Reward Function에 대해 알고 있다고 가정하는 DP에서는 기대값 \(E_\pi [ R_{t+1} + \gamma v_\pi (S_{t+1})\lvert S_t = s ]\)를 구할 수 있다. 하지만 TD의 경우 Model-Free를 가정하며, 다음 State에 대해 모르기 때문에 DP처럼 해결할 수 없다. 대신 MC처럼 기대값을 Sampling한 값으로 대체하게 된다.
참고로 MC, TD와 같이 State-Action Pair를 Sampling하여 Valu Function을 업데이트하는 것을 Sample Backup이라고 하고, DP와 같이 모든 가능성을 고려하여 업데이트 하는 것을 Full Backup이라고 한다.
TD = Sampling of MC + Bootstrapping of DP
정리하자면 TD의 Target Value인 \(R_{t+1} + \gamma V(s_{t+1})\)는 다음 두 가지 측면에서 Estimation이라고 할 수 있다.
- Sampling
- Current Estimate Value Function
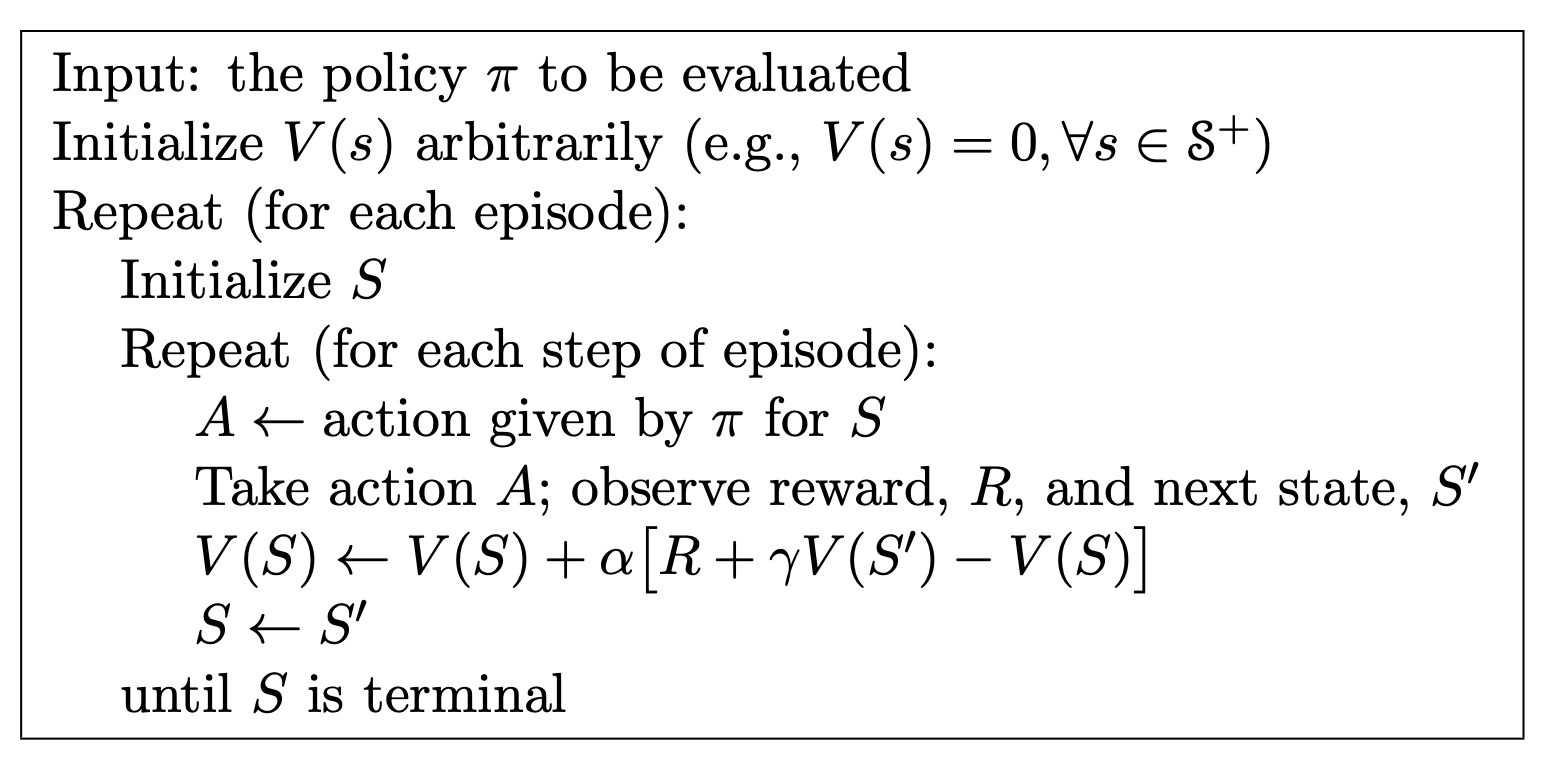
두 가지 모두에 대해 Estimation하기 때문에 Return을 계산하기 전에도, Model에 대해 알지 못해도 업데이트가 가능하다. TD의 업데이트 알고리즘은 아래와 같다.
Convergence of TD
두 가지에 대해 모두 추정한다는 점에서 TD Learning이 \(v_\pi\)로 수렴할 것인지 의문이 생길 수 있다. Step Size \(\alpha\)가 충분히 작거나 점진적으로 작아진다면 \(v_\pi\)로 수렴한다는 것이 증명되어 있다.
TD Method for Control Problem
\[V(s_t) \leftarrow V(s_t) + \alpha [r_{t+1} + \gamma V(s_{t+1}) - V(s_t)]\]TD Method를 Contorl 문제에 적용하는 기초적인 방법론으로 SARSA와 Q-learning이 있다. On-Policy인 SARSA에서는 Current Estimation \(V(s_t)\)과 Target Estimation \(V(s_{t+1})\)이 동일한 Policy에 따라 계산되지만, Off-Policy인 Q-learning에서는 서로 다른 Policy로 결정된다.
SARSA : On-Policy TD
Model-Free의 문제를 풀기 위해서는 모든 State, Action Pair에 대한 Q Function 값을 추정해야 한다(Monte Carlo Method). 따라서 위의 TD 업데이트 식을 Q function \(Q(s,a)\)에 맞춰 쓰면 다음과 같다.
\[Q(s_t, a_t) \leftarrow Q(s_t, a_t) + \alpha [r_{t+1} + \gamma Q(s_{t+1}, a_{t+1}) - Q(s_t, a_t)]\]위 식을 업데이트 하기 위해서는 \((s_t, a_t, r_{t+1} +s_{t+1}, a_{t+1})\)이 필요하다. SARSA가 S,A,R,S,A인 이유가 여기에 있다. 이를 사용하는 SARSA 알고리즘은 다음과 같다.
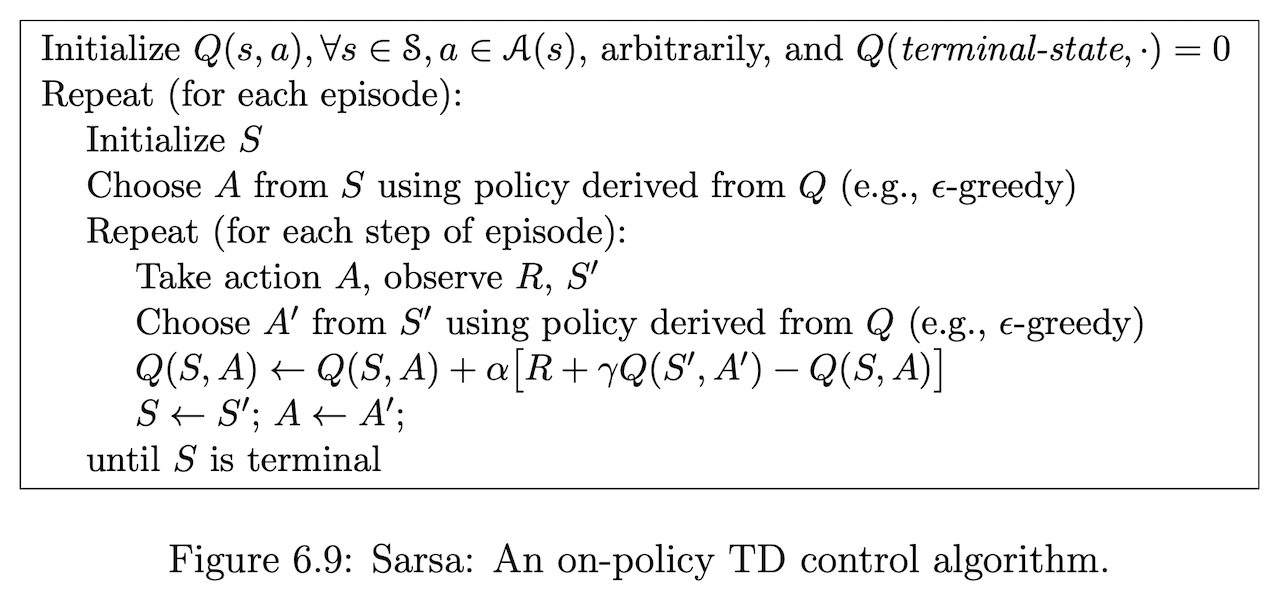
위의 알고리즘에서 확인하고 넘어갈 만한 것으로는 (1) Q Function에 따라 \(s_t\)에서 \(a_t\)를 결정하고, \(s_{t+1}\)에서 \(a_{t+1}\)을 결정한다는 것과 (2) 매 Step에서 Policy가 업데이트 된다는 것이다. (3) 모든 State, Action Pair를 경험할 수 있도록 하기 위해 \(\epsilon\)-Greedy를 사용하고 있다는 점에서 On-Policy의 특성을 반영하고 있음을 알 수 있다. 참고로 첫째 줄에도 나와있지만 \(s_{t+1}\)이 Terminal State이면 \(Q(s_{t+1}, a_{t+1})\)은 0으로 계산된다.
Q-learning : Off-Policy TD
TD Prediction 식을 거의 그대로 사용한 SARSA와 달리 Q-Laerning 식은 약간의 변화가 있다.
\[Q(s_t, a_t) \leftarrow Q(s_t, a_t) + \alpha [r_{t+1} + \gamma \max_a Q(s_{t+1},a) - Q(s_t, a_t)]\]Target을 계산할 때 사용되는 Term이 \(\gamma Q(s_{t+1}, a_{t+1})\)에서 \(\gamma \max_a Q(s_{t+1},a)\)로 바뀌었다. 이제는 \(s_t\)에서 Action \(a_t\)를 결정할 때와 \(s_{t+1}\)에서 \(a_{t+1}\)을 결정할 때 사용하는 Policy의 종류가 달라졌다. 보다 명확하게 \(s_t\)에서는 SARSA와 동일하게 \(\epsilon\)-Greedy Policy로 결정했지만 \(s_{t+1}\)에서는 항상 Q Value가 가장 클 때의 Action을 선택하고 있다. 이러한 점에서 Off-Policy라는 것이다.
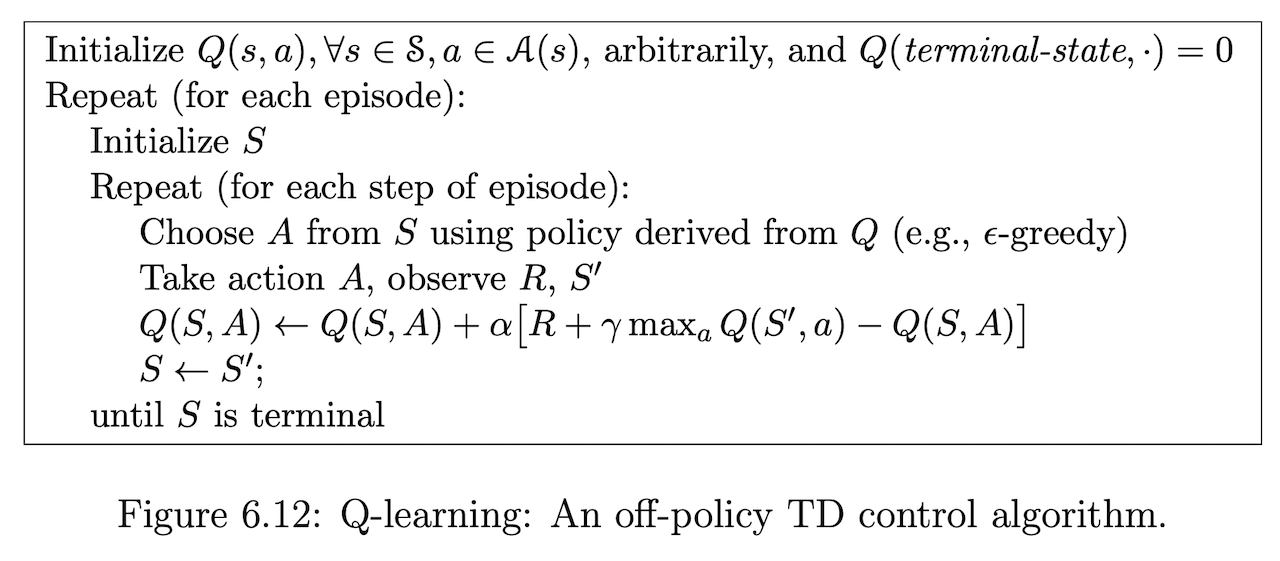
SARSA와 비교해 볼 때 알고리즘이 더욱 단순해졌다. 이러한 점에서 Q-Learning을 강화학습에서 가장 중요한 발견 중 하나로 보기도 한다.