Mujoco Env: Reacher & Hopper
- Mujoco 홈페이지
- Gym Mujoco Envs
- update at 2020.10.02
Reacher-v2
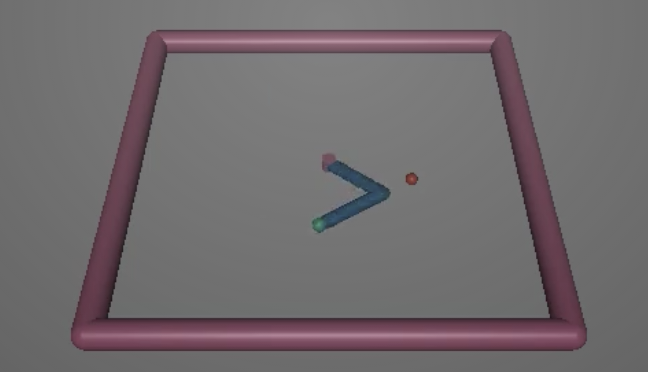
Reacher-v2는 아래 이미지와 같이 두 개의 관절로 이뤄진 로봇팔을 조작하는 환경으로, 끝 부분(Fingertip)을 임의로 생성되는 목표지점에 도달시키는 것을 목표로 한다.
Python Package gym과 mujoco-py가 설치된 환경에서 다음과 같이 생성할 수 있다.
import gym
env_name = "Reacher-v2"
env = gym.make(env_name)
Reacher-v2는 11차원의 State를, 2차원의 Action을 가진다. Reward는 일반적인 다른 강화학습 문제와 마찬가지로 Scalar 값으로 주어진다.
State of Reacher-v2
보다 구체적으로 Reacher-v2의 State는 다음과 같이 구성된다.
# gym/envs/mujoco/reacher.py
def _get_obs(self):
theta = self.sim.data.qpos.flat[:2]
return np.concatenate([
np.cos(theta),
np.sin(theta),
self.sim.data.qpos.flat[2:],
self.sim.data.qvel.flat[:2],
self.get_body_com("fingertip") - self.get_body_com("target")
])
각각이 가지는 의미는 다음과 같다.
- sim.data.qpos.flat[:2] : 로봇팔 첫 번째 축과 두 번째 축의 각도
- sim.data.qpos.flat[2:] : Target의 x,y 좌표
- sim.qvel.qpos.flat[:2] : x,y 방향에 대한 Fingertip의 속도
임의의 값을 찍어보면 다음과 같다.
| obj | value | dim(as state) |
|---|---|---|
| theta | [-0.02911098, -0.00565784] | 2(0) |
| np.cos(theta) | [-0.02911098, -0.00565784] | 2(2) |
| np.sin(theta) | [0.99957631, 0.99998399] | 2(2) |
| self.sim.data.qpos.flat | [-0.02911098, -0.00565784. 0.1. -0.1 ] | 4(2) |
| self.sim.qvel.qpos.flat | [-2.9014378, -0.56390888, 0., 0. ] | 4(2) |
| (“fingertip”)-(“target”) | [0.10989124, 0.09326832, 0., ] | 3(3) |
Action of Reacher-v2
Reacher-v2의 Action은 2차원으로, 각각 첫 번째 관절과 두 번째 관절의 각도를 의미한다. 각각에 대해 최대값과 최소값은 모두 1, -1이며 다음과 같이 확인할 수 있다.
env.action_space.high #[1. 1.]
env.action_space.low #[-1. -1.]
Reward of Reacher-v2
Reward를 계산하는 함수는 다음과 같다.
# gym/envs/mujoco/reacher.py
# def step(self, a):
vec = self.get_body_com("fingertip")-self.get_body_com("target")
reward_dist = - np.linalg.norm(vec) # Vector의 Norm
reward_ctrl = - np.square(a).sum() # Action의 제곱 합
reward = reward_dist + reward_ctrl
Reacher-v2의 Reward는 reward_dist와 reward_ctrl의 합으로 계산되며, 두 가지 모두 음수이므로 Reacher-v2의 Reward는 항상 음수가 된다.
- reward_dist: Distance의 약자로, fingertip과 target 간의 유클리디안 거리에 음수를 취한 것이다.
- reward_ctrl: Control의 약자로, Step에 주어진 Action의 크기에 음수를 취한 것이다.
각각의 값을 한 번 확인해보면 다음과 같다.
| obj | value |
|---|---|
| a(action) | [-0.87656677 0.7254853 ] |
| vec | [0. 0. 0.] |
| reward_dist | -0.0 |
| reward_ctrl | -1.2946982 |
| reward | -1.2946982383728027 |
Reset of Reacher-v2
Reacher-v2를 reset 했을 때 호출되는 함수는 다음과 같다.
def reset_model(self):
qpos = self.np_random.uniform(low=-0.1, high=0.1, size=self.model.nq) + self.init_qpos
while True:
self.goal = self.np_random.uniform(low=-.2, high=.2, size=2)
if np.linalg.norm(self.goal) < 0.2:
break
qpos[-2:] = self.goal
qvel = self.init_qvel + self.np_random.uniform(low=-.005, high=.005, size=self.model.nv)
qvel[-2:] = 0
self.set_state(qpos, qvel)
return self._get_obs()
Hopper-v3
Hopper-v3는 아래와 같이 외발이 중심을 잡아가며 앞으로 나아가도록 하는 환경이다. 따라서 넘어지지 않고 앞으로 멀리가면 갈수록 높은 Reward를 받는다.

Hopper-v3의 State는 11차원, Action은 3차원이다.
State of Hopper-v3
State를 제공하는 함수는 다음과 같다.
# gym/envs/mujoco/hopper_v3.py
def _get_obs(self):
position = self.sim.data.qpos.flat.copy()
velocity = np.clip(
self.sim.data.qvel.flat.copy(), -10, 10)
if self._exclude_current_positions_from_observation:
position = position[1:]
observation = np.concatenate((position, velocity)).ravel()
return observation
11차원은 크게 5차원의 위치 정보와 6차원의 속도 정보로 나누어 구해진다는 것을 쉽게 확인할 수 있다.
| obj | value |
|---|---|
| position | [ 1.24970027e+00 1.32572683e-03 1.04814497e-03 1.03141550e-03 -1.41838609e-03] |
| velocity | [ 0.01116277 -0.07309075 0.15096306 0.12359146 0.1217296 -0.34526038] |
Action of Hopper-v3
Hopper-v3의 Action의 최대값과 최소값은 세 요소 모두 1, -1이다.
env.action_space.high #[1. 1. 1.]
env.action_space.low #[-1. -1. -1.]
Reward of Hopper-v3
# gym/envs/mujoco/hopper_v3.py
def step(self, action):
x_position_before = self.sim.data.qpos[0]
self.do_simulation(action, self.frame_skip)
x_position_after = self.sim.data.qpos[0]
x_velocity = ((x_position_after - x_position_before)
/ self.dt)
ctrl_cost = self.control_cost(action)
forward_reward = self._forward_reward_weight * x_velocity
healthy_reward = self.healthy_reward
rewards = forward_reward + healthy_reward
costs = ctrl_cost
observation = self._get_obs()
reward = rewards - costs
def control_cost(self, action):
control_cost = self._ctrl_cost_weight * np.sum(np.square(action))
return control_cost
Hopper-v3의 Reward는 다음 식에 의해 구해진다.
- reward = forward_reward + healthy_reward - ctrl_cost
각각에 대해 살펴보면 다음과 같다.
forward_reward
forward_reward는 얼마나 앞으로 전진했는가에 관한 Reward로, 당연히 멀리가면 갈수록 높은 Reward를 받는다.
# gym/envs/mujoco/hopper_v3.py
forward_reward = self._forward_reward_weight * x_velocity
위의 식을 보면 x축 방향으로의 속도가 높으면 높을수록 높은 Reward를 받는다는 것을 알 수 있다.
healthy_reward
healthy_reward는 생존 보너스라고 할 수 있다. 생존 시 1을, 사망 시 0을 받는다.
# gym/envs/mujoco/hopper_v3.py
def healthy_reward(self):
return float(
self.is_healthy
or self._terminate_when_unhealthy
) * self._healthy_reward
ctrl_cost
ctrl_cost는 Action의 크기가 크면 클수록 Panelty를 주어 불필요한 행동을 억제하는 역할을 수행한다. 계산 방식은 다음과 같다.
# gym/envs/mujoco/hopper_v3.py
def control_cost(self, action):
control_cost = self._ctrl_cost_weight * np.sum(np.square(action))
return control_cost
values
Hopper-v3의 step에 사용되는 object들의 값을 예제로 찍어보면 다음과 같다.
| obj | value |
|---|---|
| action | [ 0.02057192 -0.14422667 0.13205169] |
| self.sim.data.qpos(before) | [0. 1.25 0. 0. 0. 0. ] |
| self.sim.data.qpos(after) | [-5.71809482e-05 1.24967843e+00 -3.19840565e-04 4.19652123e-05] |
| x_position_before | 0.0 |
| x_position_after | -5.718094824325657e-05 |
| x_velocity | -0.007147618530407071 |
| ctrl_cost | 3.866218775510788e-05 |
| forward_reward | -0.007147618530407071 |
| healthy_reward | 1.0 |
| reward | 0.992852381469593 |